卷积神经网络
Convolutional Neural Network卷积神经网络被广泛用于图像的识别,语音的处理等等,与之前的神经网络相比,出现了卷积层和池化层。
卷积层
CNN中,有时将卷积层的输入输出数据称为特征图(feature map)。其中,卷积层的输入数据称为输入特征图(input feature map),输出数据称为输出特征图(output feature map)。
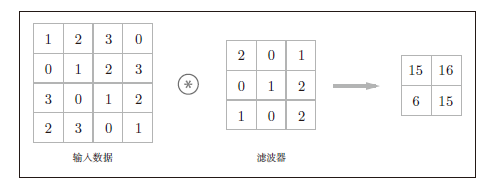
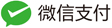
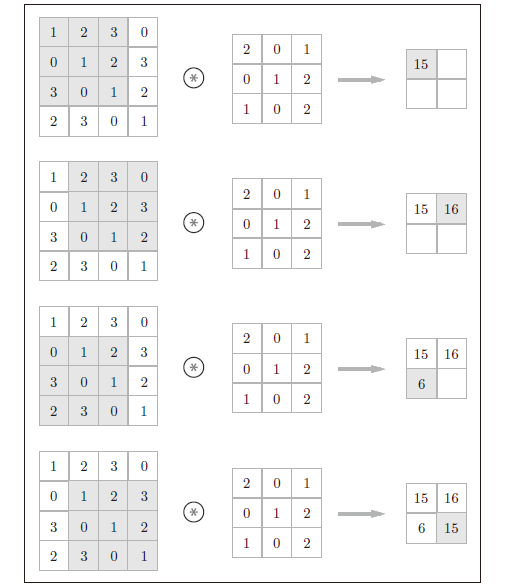
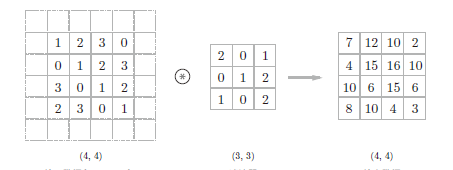
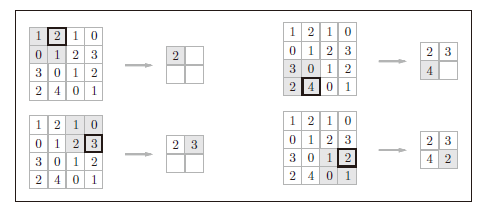
如图所示,卷积运算相当于对输入数据应用滤波器,输入大小是(4,4),输出大小是(2,2),滤波器大小是(3,3)。对于输入数据,卷积运算以一定间隔滑动滤波器的窗口并应用。如下图所示,将各个位置上滤波器的元素和输入的对应元素相乘,然后再求和(有时将这个计算称为乘积累加运算)。然后,将这个结果保存到输出的对应位置。
填充
在进行卷积层的处理之前,有时要向输入数据的周围填入固定的数据(比 如0 等),这称为填充(padding)。
使用填充主要是为了调整输出的大小。比如,对大小为(4, 4) 的输入数据应用(3, 3) 的滤波器时,输出大小变为(2, 2),相当于输出大小比输入大小缩小了2 个元素。这在反复进行多次卷积运算的深度网络中会成为问题。
为了避免出现这样的情况,就要使用填充。在刚才的例子中,将填充的幅度设为1,那么相对于输入大小(4, 4),输出大小也保持为原来的(4, 4),卷积运算可以在保持空间大小不变的情况下将数据传递给下一层。
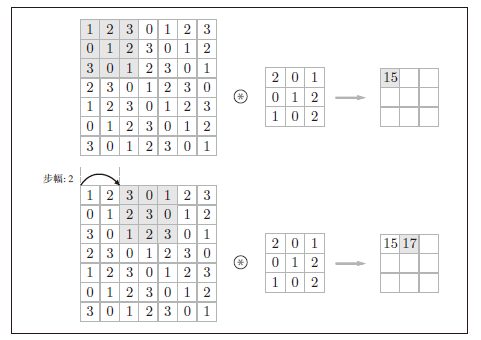
步幅
应用滤波器的位置间隔称为步幅(stride)。之前的例子中步幅都是1。以下是步幅为2的卷积运算的例子:
卷积前后的大小
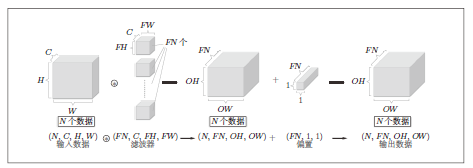
假设输入前的大小为(H,W),滤波器大小为(FH, FW),输出大小为(OH,OW),填充为P,步幅为S。此时,输出大小可通过下面的算式进行计算。
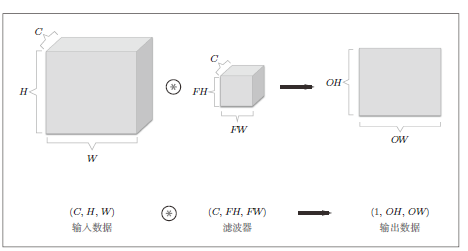
\[\begin{matrix}OH= \frac{H+2P-FH}{S}+1 \\ OW= \frac{W+2P-FW}{S}+1 \\ \end{matrix}\]图像除了长高方向之外,还需要处理通道方向。一般来说,先进行卷积计算,然后再把三个通道的计算结果相加,从而得到输出。
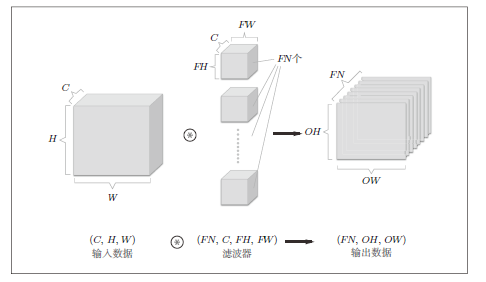
如果要在通道方向上也拥有多个卷积运算的输出,比如说有FN个滤波器,通过应用FN个滤波器,输出特征图也有FN个。作为4 维数据,滤波器的权重数据要按(output_channel, input_channel, height, width) 的顺序书写。比如,通道数为3、大小为5 × 5 的滤波器有20 个时,可以写成(20, 3, 5, 5)。
我们希望卷积运算也同样对应批处理,比如说如下图所示,对N个数据进行批处理时,数据的输入输出形状如图所示。
池化层
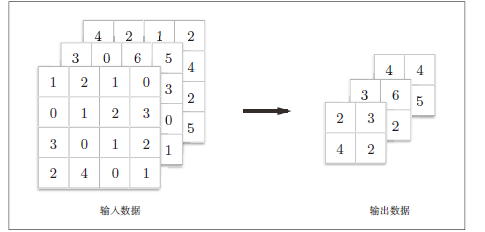
池化是缩小高、长方向上的空间的运算。比如,如下图所示,进行将2 × 2 的区域集约成1 个元素的处理,取这个2 × 2 区域的最大值被称为Max池化,可以缩小空间大小。
在这个例子中,步幅设置为2,所以2 × 2窗口的移动间隔为2个元素。
池化计算不会改变输入数据的通道数,是按照通道独立进行的。
全连接层
比如说输入图像是一通道,高28像素,宽28像素,经过全连接层之后被排列成一列,以784个数据的形式。
CNN在看什么?
局部特征,如边缘或斑块等原始信息,则随着层次加深,提取的信息也愈加复杂、抽象。
CNN的实现
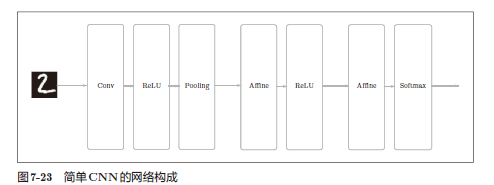
组合卷积层和池化层,可以构建出CNN。CNN的结构如下图所示。
经典CNN
LeNet
它有连续的卷积层和池化层(正确地讲,是只“抽选元素”的子采样层),最 后经全连接层输出结果。
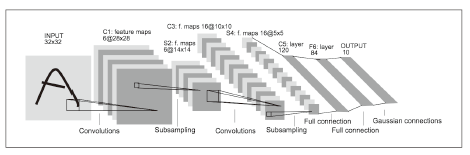
和“现在的CNN”相比,LeNet 有几个不同点。第一个不同点在于激活函数。LeNet 中使用sigmoid 函数,而现在的CNN中主要使用ReLU函数。
此外,原始的LeNet 中使用子采样(subsampling)缩小中间数据的大小,而 现在的CNN中Max池化是主流。
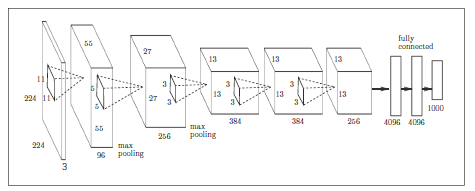
AlexNet
它的网络结构和LeNet基本上没有什么不同,但是激活函数使用ReLU;使用进行局部正规化的LRN(Local Response Normalization)层;使用Dropout。